如何拍出好的数据集
如何构建高质量的图像/视频数据集?
高质量的数据集是训练出优秀AI模型的基石。尤其在计算机视觉领域,数据集的质量直接影响模型的泛化能力和鲁棒性。本文将分享一些拍摄高质量数据集的关键要素和实用技巧。
一、优秀数据集的三大关键要素
为了让模型能够适应多变的环境,我们需要从以下三个核心维度来构建数据集:
- 远近变化 (Scale Variation)
- 视角变换 (Viewpoint Variation)
- 光线多样性 (Lighting Condition Variation)
下面,我们将以一个示例项目的素材采集过程为例,阐述这三个要素的重要性。
 (示例:工程训练中可能涉及的不同模型或物体)
(示例:工程训练中可能涉及的不同模型或物体)
1. 远近变化:捕捉不同尺度的目标
目的: 确保模型能够识别不同距离、不同大小的目标。
方法: 在拍摄视频或采集图像时,有意识地调整与目标物体的距离。可以从远处逐渐靠近目标,或者从近处逐渐拉远。这样,数据集中就会包含目标在画面中占比大(近景)和占比小(远景)的各种情况。
效果:
 (示例:展示从远到近拍摄目标的过程)
(示例:展示从远到近拍摄目标的过程)
2. 视角变换:覆盖多样的观察角度
目的: 提升模型对目标不同姿态和角度的识别能力,避免因视角单一导致过拟合。
方法: 围绕被拍摄物体,从多个不同的水平和垂直角度进行拍摄。例如,可以进行360度环绕拍摄,以及俯拍、仰拍、平拍等。
效果:
 (示例:展示从不同视角环绕拍摄目标的过程)
(示例:展示从不同视角环绕拍摄目标的过程)
3. 光线多样性:增强模型的环境适应性
目的: 提高模型在不同光照条件下的鲁棒性,使其在真实复杂环境中也能稳定工作。
方法: 采集在多种光照条件下拍摄的素材。包括但不限于: - 自然光: 晴天、阴天、黄昏、黎明。 - 人造光: 室内灯光、夜间路灯、强光源、弱光源、有阴影、无阴影。 - 特殊光线: 如反光、眩光等,如果实际应用中可能遇到,也应适当采集。
效果:
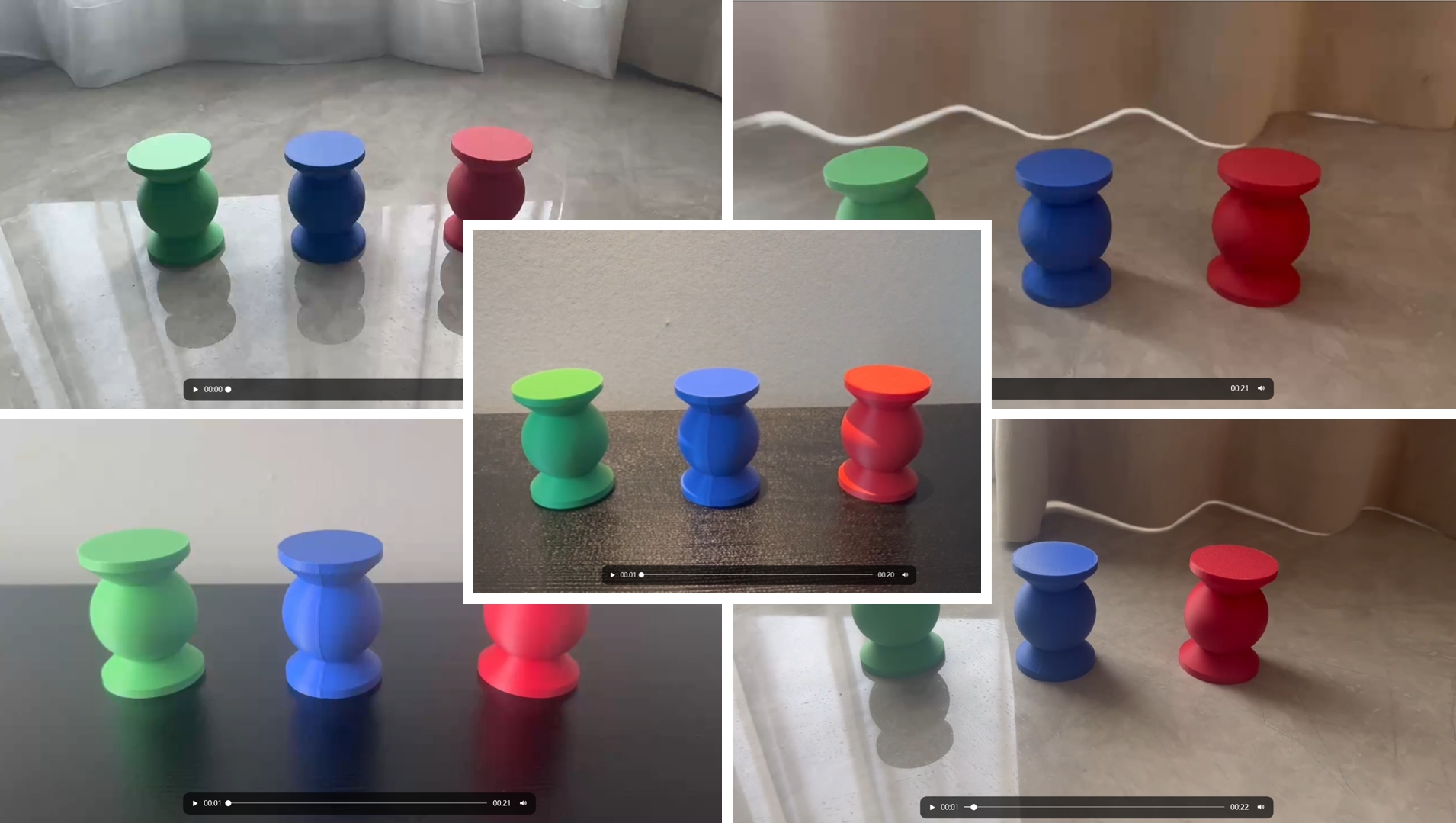 (示例:展示在不同光照条件下拍摄的同一物体)
(示例:展示在不同光照条件下拍摄的同一物体)
可以参考如下的视频:

二、核心采集策略:模拟真实应用场景
除了上述三大要素,一个至关重要的原则是:尽可能模拟模型在实际部署环境(例如机器人、自动驾驶小车等)中通过摄像头观察到的真实场景。
这意味着你需要:
- 理解最终应用的视角: 摄像头的安装位置、高度、视野范围是怎样的?
- 复现典型工况: 目标物体通常会以什么状态出现?背景环境有哪些常见的变化?
- 采集边缘案例: 考虑那些不常见但可能发生的极端情况,这有助于提升模型的泛化能力。
通过这种方式采集的数据,更能反映模型在实际应用中将面临的挑战,从而训练出更实用的模型。
三、关于训练数据量与平台选择的建议
数据量: 目前,像 MaixHub 这样的在线训练平台可能支持例如最多3000张图片进行训练。对于许多初步验证或中小型项目,这个数量通常是足够的。
提升鲁棒性: 然而,为了追求极致的鲁棒性和适应性,尤其是在复杂多变的环境中,更大规模和更多样性的数据集往往是必要的。在这种情况下,您可以考虑:
- 本地训练: 使用个人计算机或服务器进行模型训练。这样通常没有严格的图片数量限制,可以容纳更庞大的数据集。您可以查阅相关教程自行部署训练环境。
- 持续迭代: 即使初始数据集已经训练出不错的模型,也建议在实际应用中持续收集表现不佳的场景数据,并将其补充到训练集中,进行模型的迭代优化。
(备注:未来或许会有关于在个人电脑上进行一键式训练部署的开源分享,敬请期待。)
希望这些建议能帮助您构建出更优质的数据集,训练出性能更卓越的AI模型!